The GY-25T 6DOF IMU Module Kit provides a complete, ready-to-use solution for precise inclination and motion sensing. This kit includes the advanced GY-25T sensor module, which outputs stable pitch and roll angles via serial (UART) and I2C interfaces, along with a dedicated USB-TTL-01 Adapter for direct connection to a PC, enabling quick setup and integration with systems like ROS.
Product Description
The GY-25T 6DOF IMU Module is designed to simplify complex motion tracking by handling all intensive sensor fusion calculations internally. Instead of raw accelerometer and gyroscope data, the module delivers clean, digital pitch and roll angles directly in degrees. This “sensor-to-angle” approach eliminates programming complexity on your host microcontroller and provides immediate, stable results.
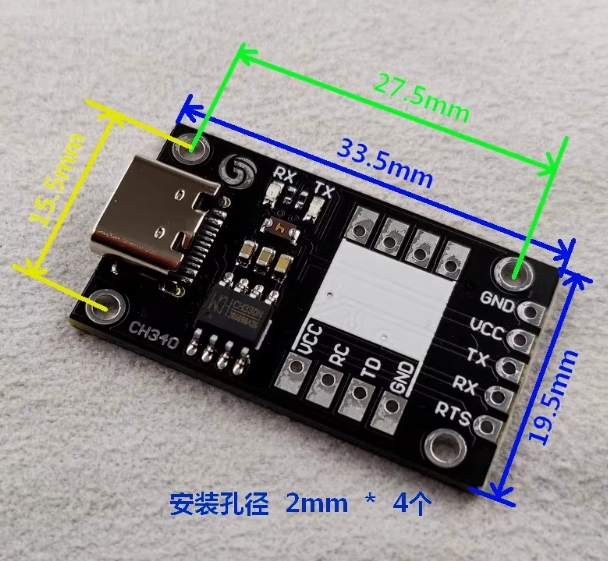
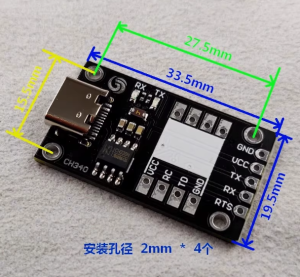
This comprehensive kit adds a crucial component: the USB-TTL-01 Adapter. This accessory allows you to plug the GY-25T module directly into your computer’s USB port. This facilitates immediate testing, calibration, and data visualization using a PC terminal program, or seamless integration into development environments like the Robot Operating System (ROS) without needing an intermediary microcontroller. The module itself operates on a flexible 3V to 5V power supply and provides both UART and I2C interfaces, offering maximum versatility for any embedded project or professional robotics application.
Key Features
- Plug-and-Play Kit: Includes the GY-25T sensor module and a USB-TTL-01 adapter for instant PC connectivity.
- Pre-processed Angle Output: Delivers stable Pitch and Roll angles in degrees (not raw data).
- Dual Communication Interfaces: Supports both UART (Serial TTL) and I2C protocols.
- ROS Support: Ideal for integration into robotics systems that require reliable orientation data via serial communication.
- Wide Voltage Compatibility: Onboard regulator allows operation from 3.3V to 5V DC power supplies.
- High Precision: Offers fine resolution of approximately 0.01 degrees with internal filtering.
- Internal Sensor Fusion: Offloads computationally intensive algorithms from the main microcontroller.