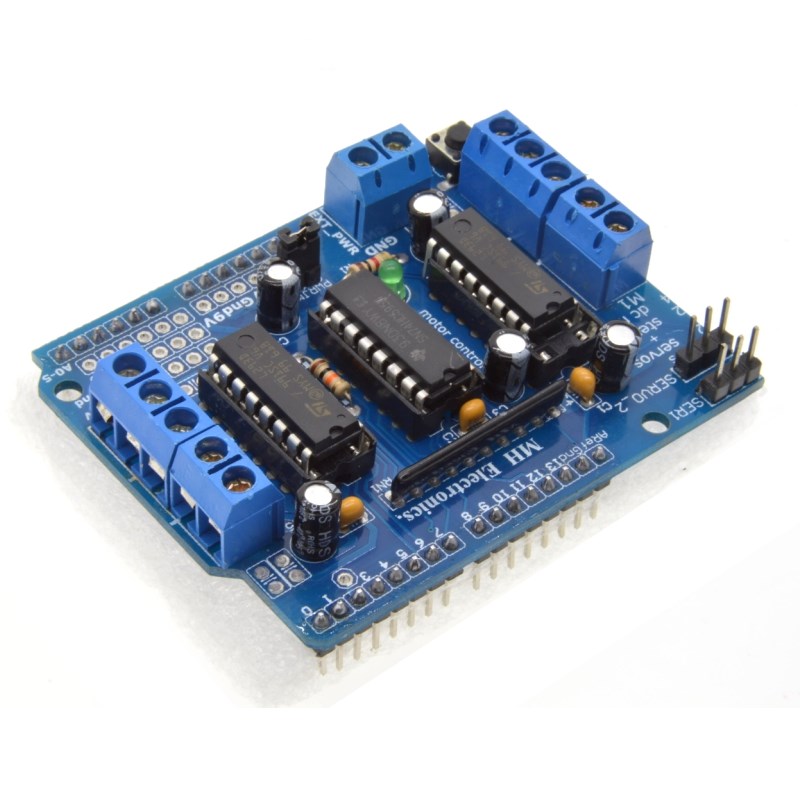
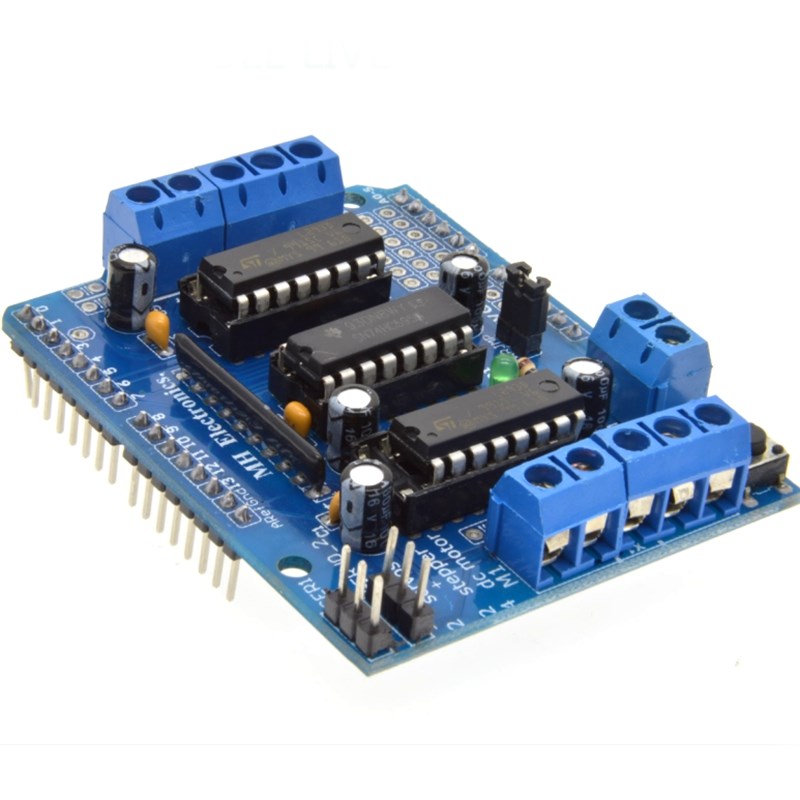
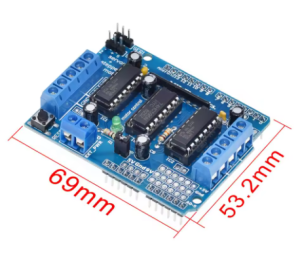
The L293D Motor Driver Board is a versatile and essential shield for any robotics enthusiast or engineer looking to control DC motors or stepper motors using an Arduino or other microcontroller platform. This robust board is built around the workhorse L293D integrated circuit, which is a monolithic integrated high voltage, high current four-channel driver.
It functions as a Dual H-Bridge, an electronic circuit that allows a voltage to be applied across a load (like a motor) in either direction. This capability provides full directional control (forward and reverse) as well as speed control for two independent DC motors simultaneously, or one bi-polar stepper motor.
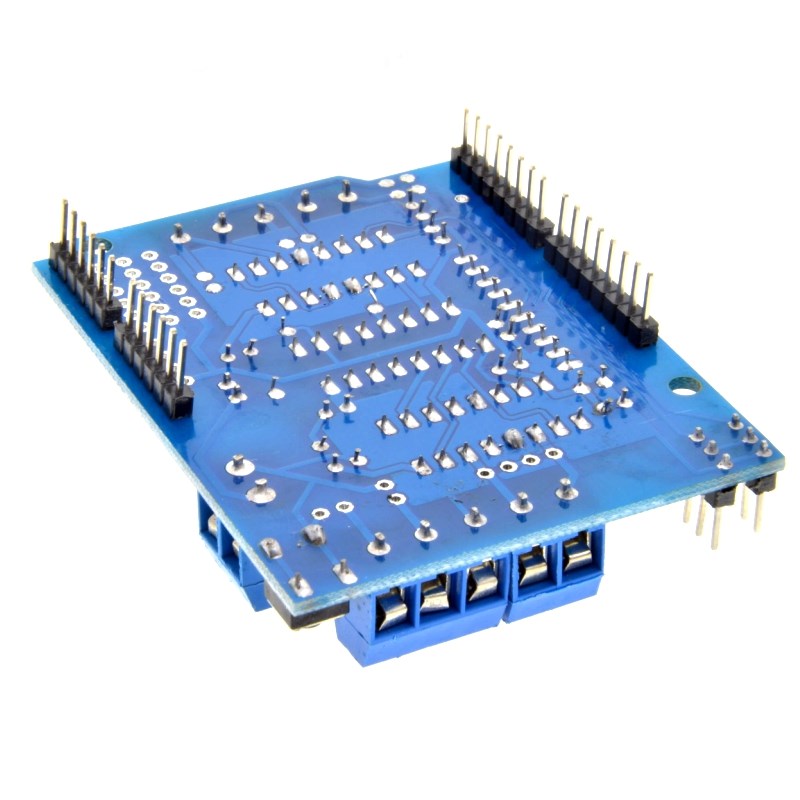
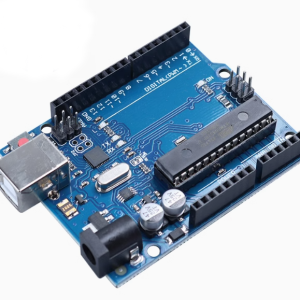
Designed with screw terminals for secure connections and female headers that plug directly into an Arduino Uno R3 or Mega 2560, the L293D shield makes integrating motion control into your projects safe, simple, and efficient.
Technical Parameters & Specifications
Parameter
Detail
Driver IC
L293D
Functionality
Dual H-Bridge (control up to 2 DC motors or 1 Stepper Motor)
Operating Voltage (Logic)
5V (from Arduino board)
Operating Voltage (Motor)
4.5V to 36V DC (External Supply Required)
Max Current per Channel
600mA Continuous (1.2A Peak)
Compatibility
Arduino Uno R3, Arduino Mega 2560 R3, Leonardo
Connectivity
Screw terminals for motors and external power, female headers for Arduino
The L293D Motor Driver Board is a fundamental component in a wide array of robotics and automation projects where precise motion control is necessary.
Mobile Robotics: This is the most common use case, enabling differential drive control for small robotic cars or wheeled platforms by independently managing the direction and speed of two drive motors.
Stepper Motor Control: The board can easily drive one 4-wire unipolar or bipolar stepper motor for applications requiring precise rotational positioning, such as camera sliders, 3D printer axes, or automated curtain openers.
Automation Systems: Used to control actuators, small pumps, or relays that require higher voltage and current than an Arduino’s standard I/O pins can provide.
Educational Kits: An excellent tool for learning fundamental electrical engineering principles like H-bridge operation, PWM speed control, and interfacing high-power components with microcontrollers.
An H-bridge is a circuit that allows you to reverse the polarity of the voltage applied to a motor. You need one because an Arduino pin can only safely output 5V/40mA. A motor driver board provides the necessary current and voltage to make motors move and allows the Arduino to safely signal which direction the motor should spin.
Q: Will this board power my large robot motor?
Check your motor’s current draw. The L293D chip is rated for 600mA (0.6 Amps) continuous current per channel. It is suitable for small hobby motors, TT motors, or standard toy DC motors. It is not suitable for high-power motors like NEMA 17 stepper motors or large RC car motors, which require drivers like the L298N or specialized MOSFET drivers.
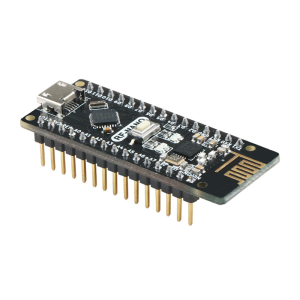
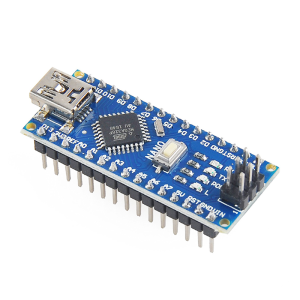
Q: Is this board compatible with the Arduino Nano or ESP32?
The board has standard female headers designed to plug directly into the form factor of the Arduino Uno or Mega. While you can connect it to a Nano or ESP32 using jumper wires, it will not plug in directly as a shield.
Q: Do I need two separate power supplies for this shield?
Yes, essentially
The logic circuit of the L293D takes 5V power from the Arduino board it is plugged into.
The motor circuit requires a separate external power supply (connected via the screw terminals) ranging from 4.5V to 36V DC. You must connect both power sources for the board to function correctly.
Q: The motors aren't spinning. What is wrong?
The most common issue is a missing power source.
Check that you have an external power supply connected to the screw terminals.
Ensure the power supply’s voltage is within the 4.5V–36V range and the polarity is correct.
Verify that the “PWR” jumper (if present on your specific board version) is correctly bridging the external power to the motor driver circuit.
Q: How do I control the speed of the motors?
Speed is controlled using Pulse Width Modulation (PWM). You connect the enable pin of the L293D to one of the Arduino’s PWM-capable pins (marked with a tilde ~ symbol) and use the analogWrite() function in your code to set the speed (0-255).
Q: Can I connect a servo motor to this board?
No, the L293D shield is designed for DC and stepper motors that require an H-bridge for polarity reversal. Standard hobby servo motors have their own internal control board and require a PWM signal but take power directly from the 5V rail; they should be connected directly to an Arduino pin or a standard sensor shield, not the L293D motor outputs.