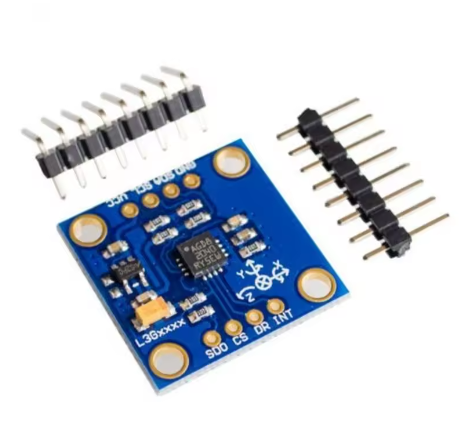
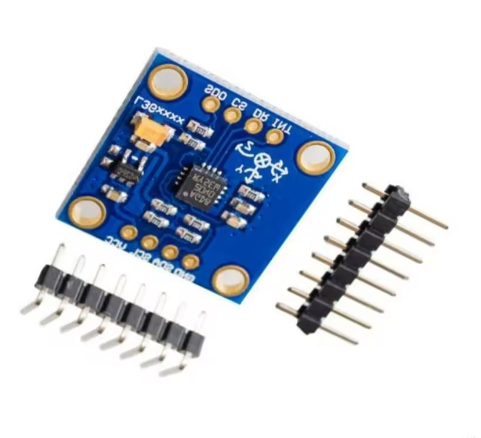
The MPU-6050 GY-52 6DOF IMU Module is a powerful and integrated sensor board that provides 6 Degrees of Freedom (6DOF) motion tracking by combining a 3-axis gyroscope and a 3-axis accelerometer on a single chip. This versatile module is essential for applications in robotics, drones, virtual reality, and human-machine interfaces.
Product Description
The GY-52 6DOF IMU Module is built around the highly popular MPU-6050 integrated circuit, a micro-electro-mechanical system (MEMS) device that captures highly accurate data regarding an object’s movement and orientation. It simultaneously measures angular velocity (rotation) with its gyroscope and linear acceleration (G-force) along the X, Y, and Z axes.
Designed for ease of integration, the module includes an onboard low-dropout (LDO) voltage regulator, enabling it to operate safely with both 3.3V and 5V power sources, making it compatible with virtually all standard microcontrollers (e.g., Arduino Uno, Raspberry Pi, ESP32). Communication is handled via the simple and efficient I2C interface, minimizing pin usage.
A key feature is the integrated Digital Motion Processor (DMP), which can offload intensive sensor fusion calculations from the host microcontroller, allowing for efficient determination of complex orientation (pitch, roll, yaw). This makes the GY-52 module the foundational component for building stable drones, self-balancing robots, and gesture-controlled devices.
Key Features
- 6 Degrees of Freedom: Combines a 3-axis gyroscope and a 3-axis accelerometer in a single package.
- Wide Operating Voltage: Onboard regulator supports 3V to 5V power input.
- 16-Bit Resolution: High-precision Analog-to-Digital Converters (ADCs) provide detailed, noise-resistant data.
- Integrated DMP: Internal processor handles complex algorithms like MotionFusion to reduce microcontroller workload.
- Standard I2C Communication: Easy 2-wire digital interface for seamless integration.
- Auxiliary I2C Bus: Allows attachment of external sensors, such as a magnetometer (compass), to achieve full 9-DOF functionality.
- Onboard Temperature Sensor: Integrated ambient temperature measurement for thermal compensation.