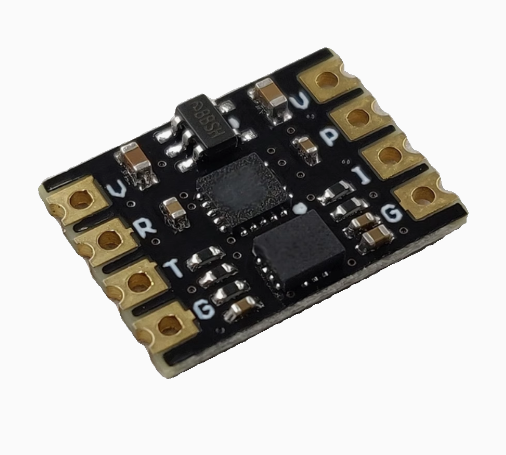
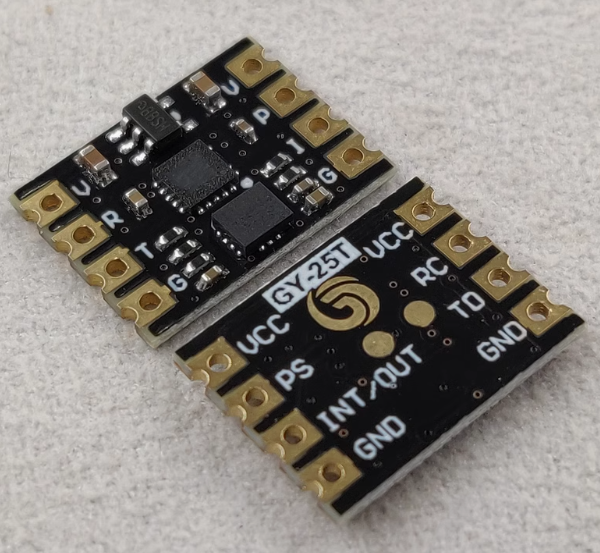
The GY-25T 6DOF IMU Module is a versatile 6-Degrees of Freedom Inertial Measurement Unit designed to provide pre-processed, stable tilt angle data via both UART (Serial) and I2C communication interfaces. This module is an excellent solution for robotics, specifically within the ROS (Robot Operating System) framework, requiring reliable pitch and roll measurements without the need for complex microcontroller-level sensor fusion algorithms.
Product Description
The GY-25T module offers a powerful integration of a 3-axis accelerometer and a 3-axis gyroscope within a single compact unit. What sets it apart is the onboard processing unit that executes sophisticated sensor fusion algorithms internally. This results in direct, reliable digital outputs of calculated pitch and roll angles in degrees, drastically simplifying development time for engineers and hobbyists alike.
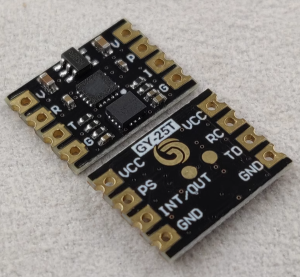
With the GY-25T, you bypass the challenges of managing raw sensor data, calibration routines, and mathematical drift correction on your main control board. The module provides a plug-and-play experience, offering both a high-speed serial interface for rapid data polling (ideal for ROS integration) and a flexible I2C interface. It operates across a wide power supply range of 3.3V to 5V and features an onboard voltage regulator, ensuring compatibility with virtually any contemporary development platform, from Arduino to Raspberry Pi and specialized industrial controllers.
Key Features
- Integrated 6DOF Sensing: Combines 3-axis acceleration and 3-axis gyroscope data acquisition.
- Pre-Processed Angle Output: Delivers stable, filtered Pitch and Roll angles in degrees (not raw data).
- Dual Communication Interfaces: Supports both UART (Serial TTL) and I2C protocols for versatile connectivity.
- Wide Voltage Compatibility: Onboard regulator allows operation from 3.3V to 5V DC power supplies.
- High Resolution: Provides detailed angle measurement with fine precision (typically 0.01° resolution).
- Internal Sensor Fusion: Offloads computationally intensive algorithms from the main microcontroller.
- ROS Ready: Ideal for use in Robot Operating System projects requiring reliable orientation data.