Product Overview
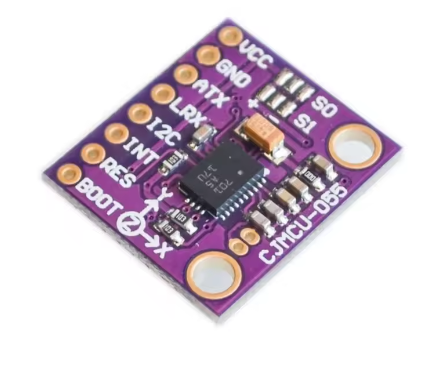
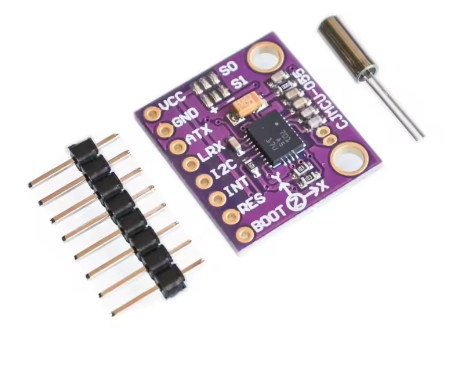
The BNO055 9-Axis Absolute Orientation Sensor is an all-in-one “System in Package” (SiP) solution designed to eliminate the complexity of motion-sensing algorithms. Unlike standard IMUs that provide raw data requiring heavy external processing, the BNO055 features an integrated 32-bit ARM Cortex-M0+ microcontroller. This onboard processor runs proprietary sensor fusion software (BSX3.0 FusionLib) to deliver ready-to-use, drift-free orientation data directly to your application.
Whether you are developing autonomous drones, industrial robotics, or high-precision AR/VR wearables, this module provides a “plug-and-play” experience by handling all the complex math internally.
Key Features
- Integrated Sensor Fusion: Onboard MCU processes raw data from the accelerometer, gyroscope, and magnetometer to output stable Euler angles and Quaternions.
- Nine Degrees of Freedom (9-DoF): Comprehensive motion tracking across three axes for acceleration, rotation, and magnetic field strength.
- Intelligent Self-Calibration: Continuously calibrates itself during operation to adjust for environmental changes like temperature shifts or magnetic interference.
- Multiple Data Outputs: Simultaneously provides absolute orientation, angular velocity, linear acceleration, gravity vectors, and ambient temperature.
- Professional Reliability: Rated for industrial temperatures (-40°C to +85°C), ensuring performance in demanding outdoor or factory environments.
- Flexible Communication: Supports both I²C and high-speed UART interfaces for seamless connection to Arduino, Raspberry Pi, ESP32, and STM32.