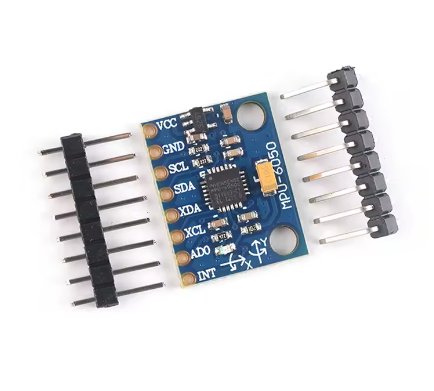
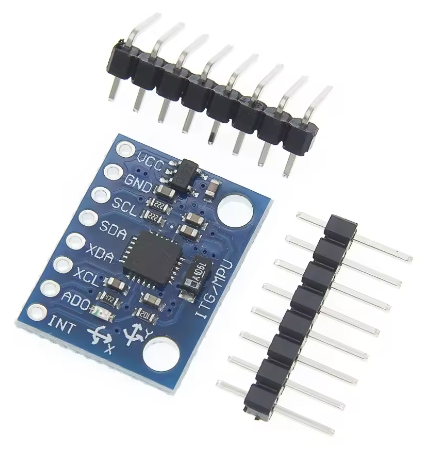
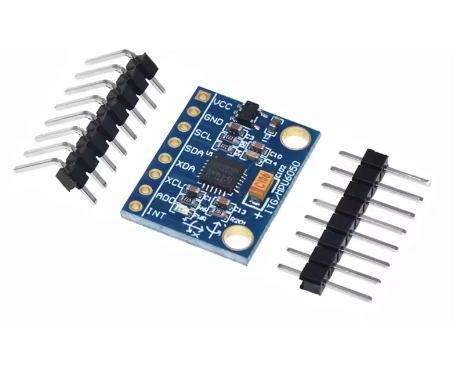

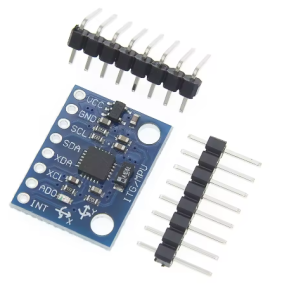
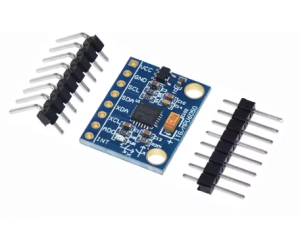
The GY-521 MPU-6050 Module is a high-performance 6-axis MotionTracking device that combines a 3-axis gyroscope and a 3-axis accelerometer on a single silicon die. This specific version features an original MPU-6050 chip and high-quality yellow tantalum capacitors for superior power filtering and signal stability, making it the gold standard for DIY robotics, drones, and professional motion-sensing applications.
Product Description
The GY-521 MPU-6050 is a comprehensive 6-Degree of Freedom (6-DOF) sensor module. At its core is the MPU-6050, which features three 16-bit analog-to-digital converters (ADCs) for digitizing the gyroscope outputs and three 16-bit ADCs for digitizing the accelerometer outputs. This allows for simultaneous tracking of both rotational and linear motion with high precision.
To ensure professional-grade reliability, this module is equipped with yellow tantalum capacitors. Unlike cheaper ceramic alternatives, tantalum capacitors provide exceptionally low ESR (Equivalent Series Resistance) and stable capacitance over a wide temperature range, significantly reducing electronic noise and drift in the sensor data. The module also includes an onboard Digital Motion Processor (DMP), capable of processing complex 9-axis MotionFusion algorithms. This offloads the intensive computation from the main microcontroller, allowing even simple boards like an Arduino to handle complex orientation sensing (Euler angles or Quaternions) with ease.
Key Features
- Original MPU-6050 Silicon: Ensures full compatibility with standard libraries and reliable calibration.
- Enhanced Stability: Features yellow tantalum capacitors for improved power filtering and reduced sensor noise.
- Integrated DMP: Internal Digital Motion Processor handles complex motion algorithms internally.
- 6-Axis Sensing: 3-axis angular rate sensor (gyro) and 3-axis accelerometer in one package.
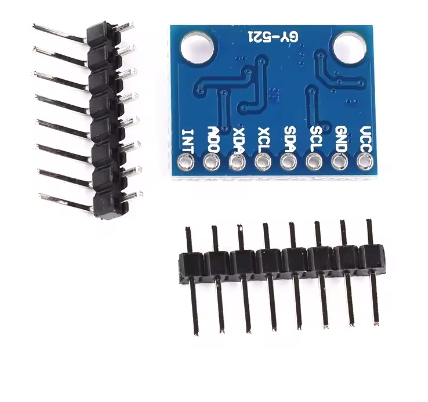
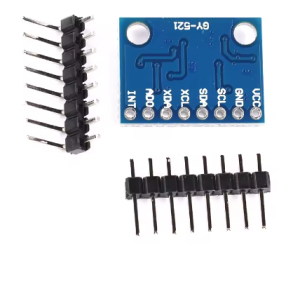
- Auxiliary I2C Bus: Can interface with external sensors (like a magnetometer) to create a full 9-axis system.
- Built-in Temperature Sensor: Provides ambient temperature data for thermal compensation.
- Compact GY-521 Form Factor: Standard pinout for easy integration into breadboards and custom PCBs.