


Product Overview
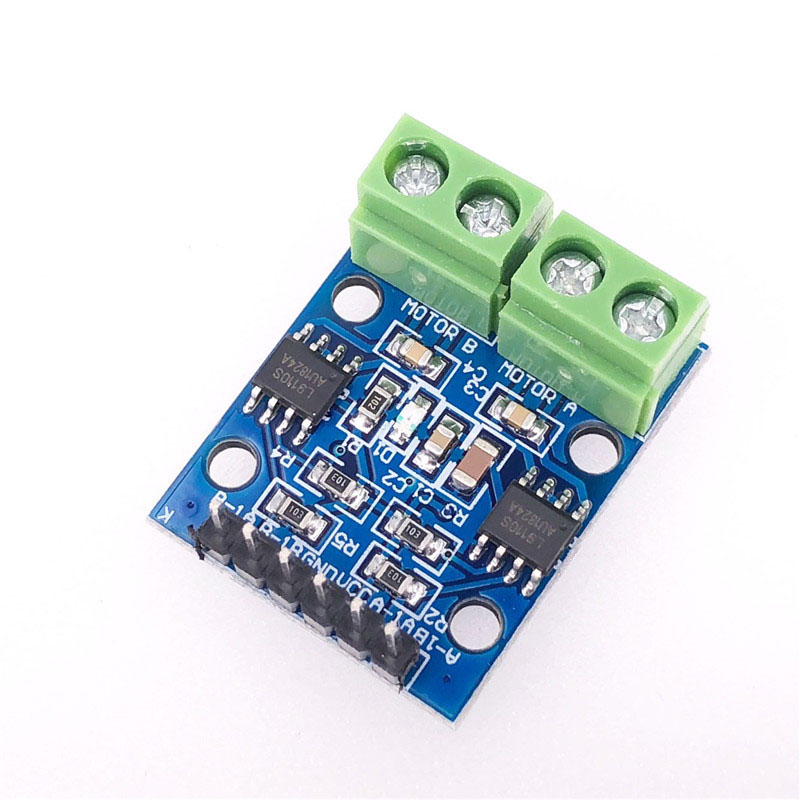
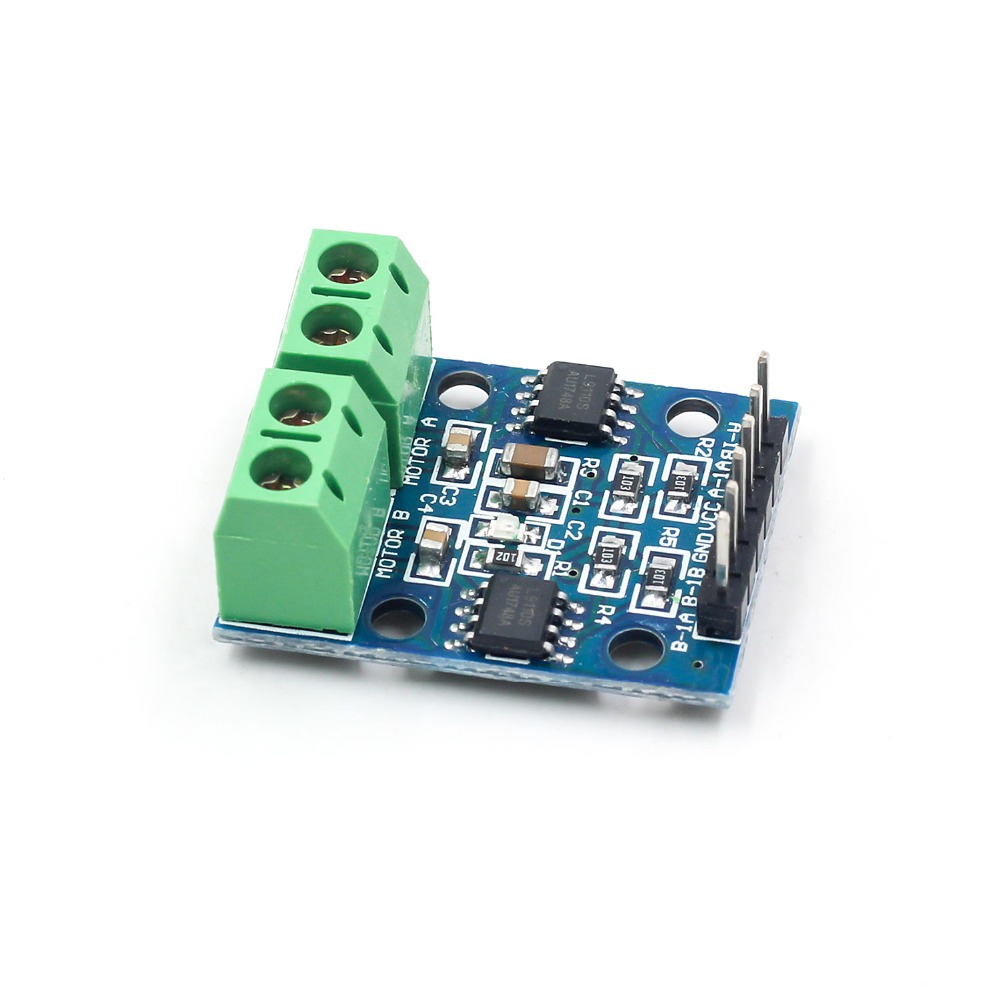
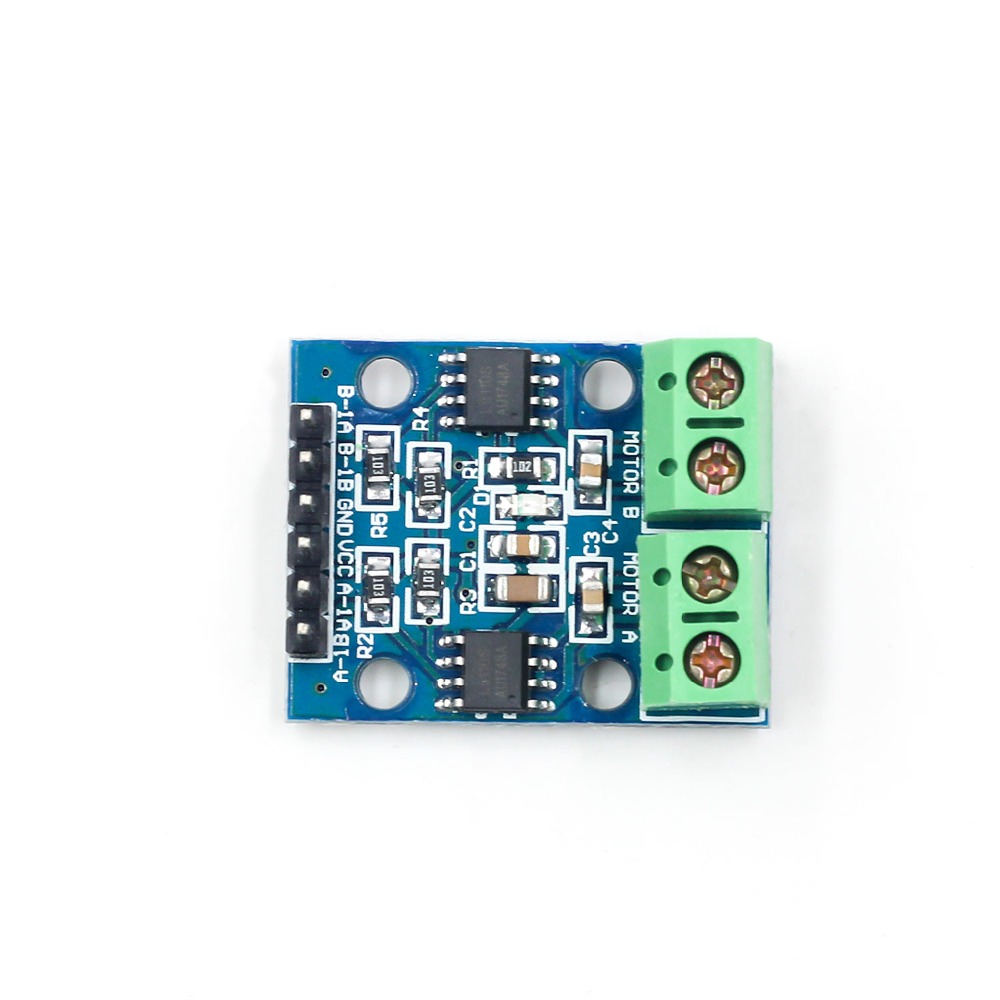
The L9110S Dual-Channel Motor Driver Board is a compact, high-efficiency H-bridge driver module designed for controlling small DC motors or a single 4-wire bipolar stepper motor . Built around the L9110S motor driver IC, this board integrates two independent H-bridge circuits, allowing you to control the speed and direction of two DC motors simultaneously or drive one stepper motor with precision .
This module is a favorite among hobbyists and professionals for smart car projects, DIY robots, and automation systems . It offers a simple control interface: you use standard PWM (Pulse Width Modulation) signals for speed control and standard digital outputs (High/Low) to change the motor’s direction . The control logic is straightforward, with all critical signal pins broken out to easy-to-use 2.54mm headers.
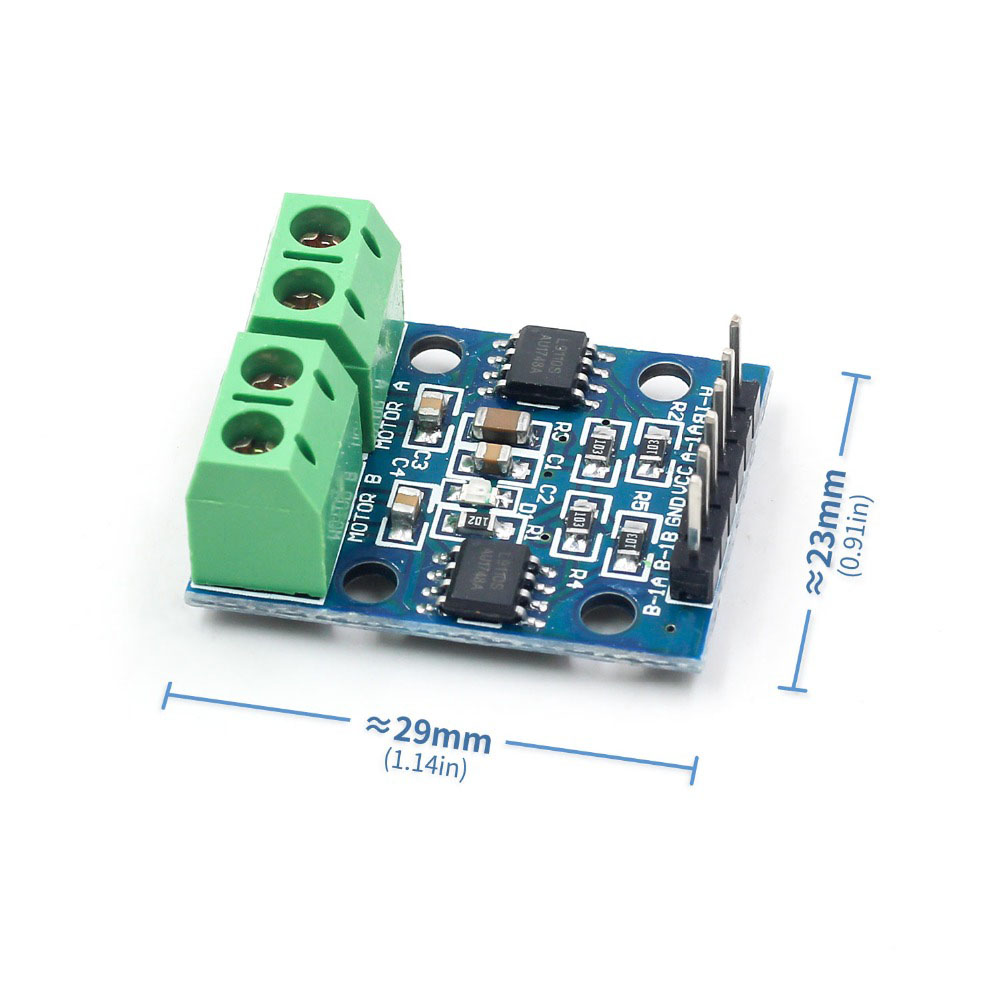
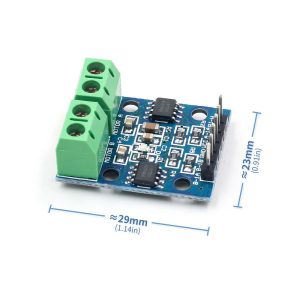
One of the biggest advantages of the L9110S is its miniaturized size. The board measures approximately 29mm x 21mm, making it ideal for portable and space-constrained applications . Despite its small footprint, it features built-in flyback diodes for protection against motor-induced voltage spikes, ensuring the stability and longevity of your main control circuit . Whether you are building a line-follower robot or a wireless smart car, the L9110S provides the essential drive power you need.
Key Features
-
Dual Channel H-Bridge: Two independent H-bridge channels that can control two DC motors (bi-directional) or one 4-wire stepper motor simultaneously.
-
Wide Power Supply Voltage: Wide operating voltage range of 2.5V to 12V, supporting both 3.3V and 5V logic systems.
-
High Current Output: Each channel supports a continuous current of up to 800mA, with a peak current capability of up to 2A.
-
PWM & Direction Control: Supports PWM for smooth speed regulation and digital logic for motor direction control.
-
Compact Size: Extremely small board dimension of 29mm × 21mm, fitting perfectly into small robotic chassis.
-
Built-in Protection: Onboard flyback diodes absorb reverse currents generated by the motor, protecting the IC from damage.
-
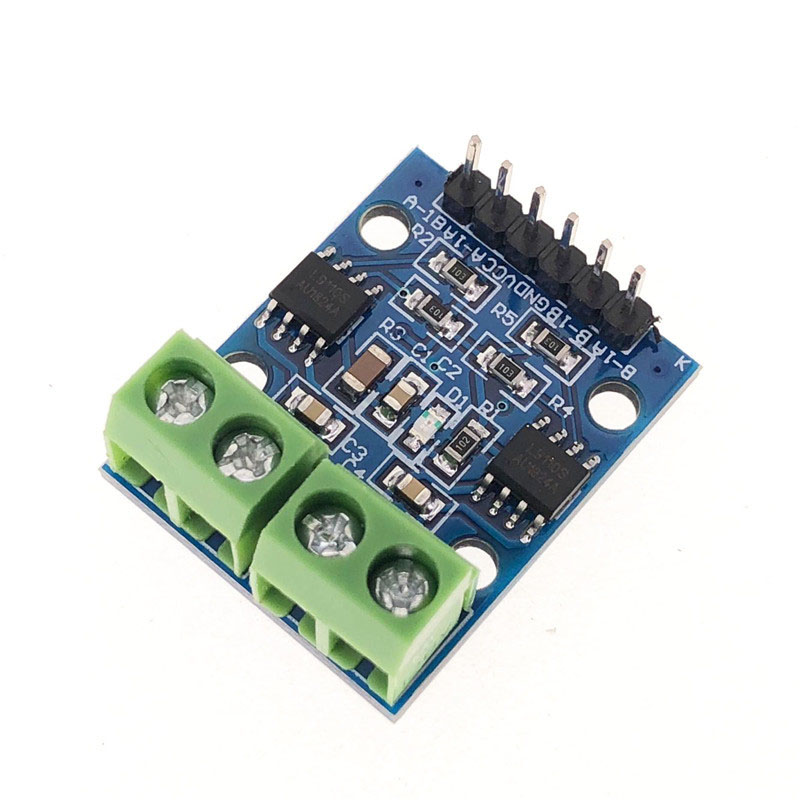
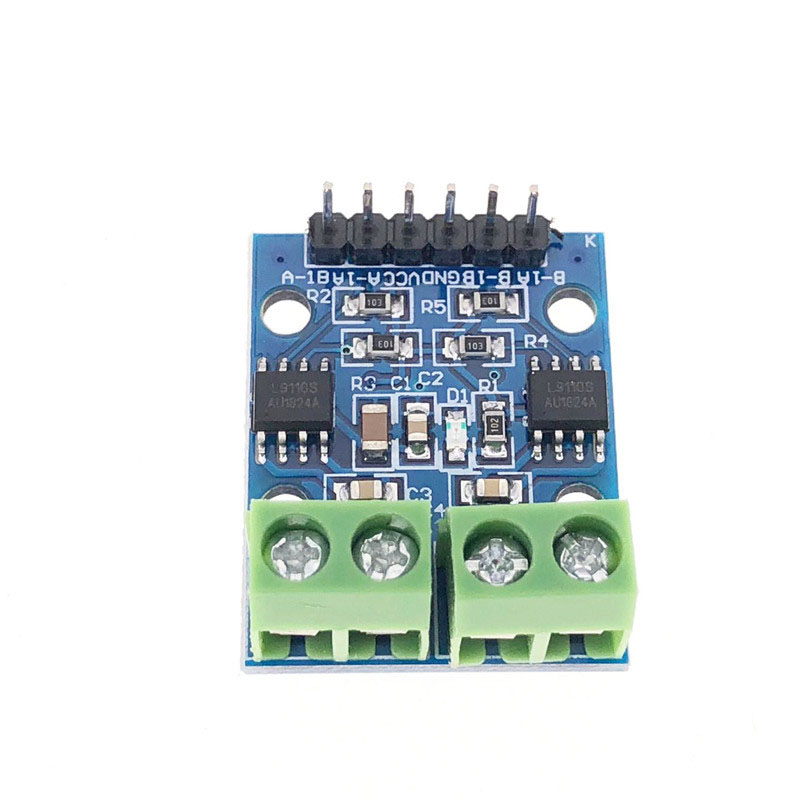
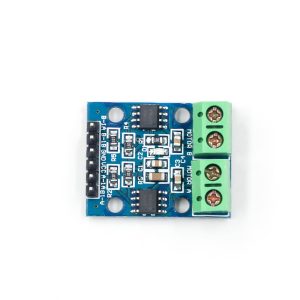
Simple Pin Interface: 4 control pins (A-IA, A-IB, B-IA, B-IB) and 4 motor output terminals (Motor A/B).
-
Dual Power Input: Separate power lines for the logic chip (VCC) and the motor power supply, reducing interference.
-
Mounting Holes: Includes 4 mounting holes (3mm diameter) for easy installation onto robot frames or enclosures.
-
Wide Compatibility: Perfect for use with Arduino UNO, Nano, Mega, ESP32, and STM32 development boards.
Technical Specifications
| Parameter | Operating Value |
|---|---|
| Chip Type | L9110S (Dual H-Bridge) |
| Number of Channels | 2 (Independent) |
| Operating Voltage (VCC) | DC 2.5V – 12V |
| Continuous Output Current (Per Channel) | 800mA |
| Peak Output Current (Per Channel) | 2A |
| Control Signals | TTL Level (3.3V/5V Compatible) |
| Speed Control Method | PWM (Pulse Width Modulation) |
| Logic Input Level | High: 2.5V – 5V, Low: 0V – 0.5V |
| Board Dimensions | 29mm × 21mm × 5mm |
| Mounting Hole Diameter | 3mm |
| Weight | Approx. 5g – 10g |
